
ISU researchers develop micro-tentacles
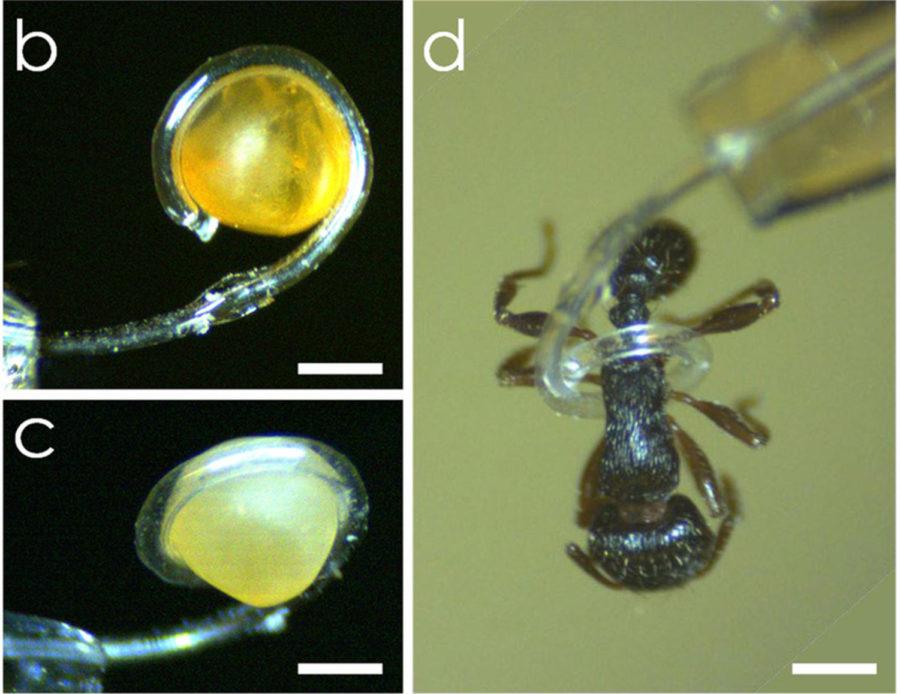
Figures (b) and (c) are optical micrographs showing the micro-tentacle’s ability to grab and hold a Mallotus villosus egg by winding around it conformally, and figure (d) shows another micro-tentacle grabbing and holding an ant.
July 7, 2015
Ants are everywhere this time of year. They spring up on lawns, in sidewalk cracks, in cupboards — and at Iowa State, in the grasp of a plastic tentacle about the size of a human hair.
ISU engineers Jaeyoun “Jay” Kim, Jungwook Paek and In-Ho Cho have developed a soft microrobotic tentacle capable of safely clutching objects as small as insects, fish eggs and delicate human tissues.
“These days, there are two new trends [in robotics]. The first one is soft robotics,” Kim said.
Soft robotics is the process of making robots out of unconventional materials like plastic or rubber instead of hard metal. Kim says soft robots are useful for human-related work.
“You certainly don’t want a robot that looks like C-3PO to carry a child,” he joked.
The second trend, Kim says, is microrobotics, the process of making robots at a very small scale.
Kim’s team’s work pursued both trends in its tentacle development.
The team’s breakthrough tentacle is inspired by a previous project on which Kim and Paek had previously collaborated.
“Last year, we made small micropillars and we broke the world record on that,” Kim said.
The research group then took that idea a bit further.
“If we can make a pillar, we can hollow it out and make a tube. Once we made the tube, we realized we could use it as a robot,” Kim said.
In order to better understand how the tentacles would move, Cho, a structural engineer, was contacted.
“Mostly, [structural engineers] deal with big-scale, like bridges, buildings and so on. But microrobotics also deal with structure; the only difference is size,” Cho said.
Cho helped find an equation that would explain the robot’s motion, which displayed unusual winding behavior. He compares the hollow tentacle to a straw with a thicker ring attached.
Cho said by putting a thicker point on the straw, it gives the structure some non-uniformity, giving the robot its multiple winding behavior.
This tentacle is a new way of holding objects at microscale, Kim said. A Japanese research team had already developed a “two-fingered” grasper, but this ran the risk of pinching and damaging fragile items like human tissue.
“Hurting or damaging otherwise normal tissue is a serious issue. Safety always comes first,” Kim said.
An advantage of these tentacles is that they are powered by air or water, unlike some other soft robots. The team believes its tentacle is ideal to handle delicate structures like blood vessels or delicate organisms.
The robot cannot cut or break down very delicate tissue at micro scales, Cho said.
“You don’t really want to put some strange chemical in your body and you don’t want to put high-voltage [electricity] into your body either,” Kim added.
The team’s hopes for future development include mass-production, increasing range of motion, making the tentacles even smaller and working toward widespread medical use.
“[In the future,] we will all have robots in our body. That’s for sure,” Kim said.













